Eingesetzte Reglertechnologien
In der Prozessindustrie kommen unterschiedliche Regeltechnologien zum Einsatz, um den vielfältigen Anforderungen und Herausforderungen gerecht zu werden. Einfache Prozesse, die stabile und lineare Eigenschaften aufweisen, können oft mit klassischen Regeltechnologien wie PID-Reglern effizient gesteuert werden. Diese sind besonders geeignet für Anwendungen, bei denen schnelle und präzise Reaktionen erforderlich sind.
Komplexe und nichtlineare Prozesse erfordern hingegen fortschrittlichere Regeltechnologien wie Fuzzy-Logik-Regler oder neuronale Netze. Diese Technologien können besser mit den komplexen Zusammenhängen und Veränderungen im Prozessverlauf umgehen. Für Prozesse mit langsamen Dynamiken und mehreren Eingangs- und Ausgangsgrößen bietet Model Predictive Control (MPC) eine effiziente Lösung, da sie zukünftige Zustände vorhersagen und optimieren kann.
Die Wahl der geeigneten Regeltechnologie hängt auch von der Verfügbarkeit von Prozessdaten, den Sicherheitsanforderungen und den verfügbaren Ressourcen ab. Adaptive Regelungen sind beispielsweise für Prozesse geeignet, deren Eigenschaften sich im Laufe der Zeit ändern, während prädiktive Algorithmen zur Optimierung der Energieeffizienz und Produktionsqualität beitragen können. Letztlich wird oft eine Kombination verschiedener Technologien verwendet, um die bestmöglichen Ergebnisse zu erzielen.
Möchten Sie mehr erfahren? Sollen wir Sie anrufen oder möchten Sie weitere Informationen per E-Mail erhalten?

Sebastian Sturm
Ich bin für Sie da!
Sebastian Sturm ist Ihr Experte, wenn es um Reglertechnologien geht!
Reglertechnologien
Modellprädiktive Regelungen setzen ein mathematisches Modell des geregelten Prozesses ein, um die Regelgröße optimal zu regeln. Dazu wird das Modell laufend mit den realen Prozessgrößen abgeglichen und für die Vorhersage des zukünftigen Verhaltens des Prozesses verwendet.
Diese Vorhersage verwenden wir in einer in Echtzeit ausgeführten Optimierung weiter, um die optimale Stellgröße für den aktuellen Zeitschritt zu finden. Als Ergebnis ist ein sehr schnelles, stabiles Regeln Ihres Prozesses möglich, durch das wir signifikante Verbesserungen (z.B. im Vergleich zu PID-basierten Konzepten) erreichen.
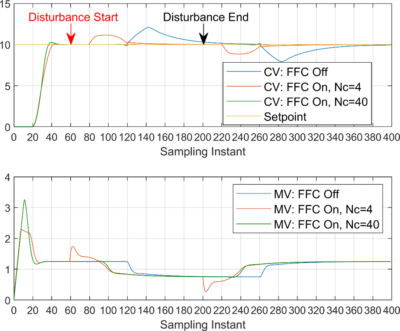 Durch Berücksichtigung bekannter Störungen in der Zielfunktion ist es durch entsprechendes Feedforward Control (FFC) möglich, auch Störungen mit sehr langen Totzeiten ohne kritische Regelgrößenabweichung auszugleichen.
Durch Berücksichtigung bekannter Störungen in der Zielfunktion ist es durch entsprechendes Feedforward Control (FFC) möglich, auch Störungen mit sehr langen Totzeiten ohne kritische Regelgrößenabweichung auszugleichen.

Der Einsatz von MPC bietet wesentliche Vorteile bei der Regelung nichtlinearer Systeme. Zu diesen zählen unter anderem die implizite Behandlung von Stellgrößenbeschränkungen sowie die Möglichkeit, Systeme sehr nahe an diesen Beschränkungen optimal zu betreiben, die einfache Erweiterung auf Mehrgrößensysteme sowie die modellbasierte Berücksichtigung von Systemtotzeiten.
Gerade die Regelung letzterer Systemklasse stellt einen typischen Anwendungsfall modellprädiktiver Reglerstrukturen dar.
Model Predictive Control (MPC):
-
Verwendet ein dynamisches Modell des Prozesses, um zukünftige Zustände vorherzusagen und optimale Regelstrategien zu entwickeln
-
Besonders geeignet für Systeme mit langsamen Dynamiken und mehreren Eingangs- und Ausgangsgrößen
-
Einsatz in der Öl- und Gasindustrie, der petrochemischen Industrie und der Nahrungsmittelindustrie
Ihre Vorteile einer MPC-Regelung im Überblick
-
Regelung von Mehrgrößensysteme (MIMO) mit einem MPC
-
Integrieren von Störungen Modell, minimieren des Regelfehlers
-
Berücksichtigen von Nichtlinearitäten
-
Reagieren auf bekannte zukünftige Sollwertänderungen
-
Direktes Kompensieren von Totzeiten
-
Direktes Berücksichtigen Statischer/Dynamischer Beschränkungen
-
Optimieren des Prozesses in jedem Zeitschritt
-
Beschleunigen transienter Prozessänderungen
-
Minimieren von Verlusten durch Sollwertänderungen
-
Ermöglichen des Stabilitätsnachweises
Neuronale Netze stellen im Gegensatz zu den klassischen Modellen zahlreiche nichtlineare Funktionen dar und bilden damt komplexe und mehrdimensionale Probleme ab.
Es können beliebig komplexe nichtlineare Effekte abgebildet werden, mit der großen Einschränkung, dass viele Prozessdaten vorhanden sein müssen und das Modell nur für in diesen Prozessdaten vorhandenen Anlagenzustände gültig ist (keine Extrapolierbarkeit).
Neuronale Netze extrahieren aus den großen Datenmengen selbstständig relevante Zusammenhänge. Dadurch sind sie eine wertvolle Ergänzung zu physikalisch-logischen Modellierung, die oft unzureichend oder nur mit sehr großem Aufwand durchführbar ist.
Sie nutzen künstliche Intelligenz zur Modellierung und Regelung komplexer Prozesse und haben die Fähigkeit zur Erkennung und Anpassung an nichtlineare Beziehungen im Prozess. Sie kommen zur Anwendung in der Mustererkennung und der vorausschauenden Wartung.
Neuronale Netze setzen wir in der Praxis als sogenannte Black-Box Modelle ein.
Folgende Problemstellungen adressieren wir mit Neuronalen Netzen
-
Nichtlineare Systemidentifikation
-
Zustandsbeobachter Design
-
Reglerentwurf
-
Neural adaptive control
-
Neural optimal control
-
Reinforcement learning
-
NLq Stabilitätstheorie
-
PID-Regler (Proportional-Integral-Derivative-Regler):
-
Weit verbreitet und vielseitig einsetzbar
-
Besteht aus drei Komponenten: dem proportionalen, dem integralen und dem differentiellen Anteil
-
Wird zur Regelung von Prozessen verwendet, bei denen schnelle und präzise Reaktionen erforderlich sind
PID Regler sind der vielseitigste Reglertyp. Wir passen das Reglerverhalten durch eine Vielzahl an praktischen Herangehensweisen an Ihren spezifischen Anwendungsfall an:
-
Intelligente min/max Grenzen
-
Situationsbedingtes Einfrieren des Reglerausgangs
-
Vorsteuerung
-
Gain-Scheduling für unterschiedliche Reglerdynamik
-
Antiwindup bei Kaskadenregelungen
-
Begrenzungsregler, die durch eine min/max Auswahl auf den Reglerausgang durchgeschaltet werden
-
Regler Tracking, wenn die Regelung inaktiv ist für ein sprungfreies Umschalten
Fuzzy-Logik-Regler:
-
Nutzt unscharfe Logik, um komplexe und nichtlineare Systeme zu steuern
-
Besonders nützlich, wenn die mathematische Modellierung des Systems schwierig ist
-
Wird häufig in der chemischen Industrie und bei der Regelung von Verbrennungsprozessen eingesetzt
Um eine optimale Regelperformance zu erreichen und langfristigen Mehrwert zu generieren, beziehen wir je nach Problem- und Zielstellung in die jeweiligen spezifischen Kundenlösungen auch Konzepte aus dem Bereich Fuzzy Control im Sinne ganzheitlicher APC Lösungen mit ein.
Die Adaptive Regelung
-
passt die Regelparameter kontinuierlich an, um Änderungen im Systemverhalten zu berücksichtigen
-
ist geeignet für Prozesse, bei denen sich die Eigenschaften im Laufe der Zeit ändern
-
kommt zur Anwendung in der Automobilindustrie und bei der Regelung von Bioprozessen
Diese Regeltechnologien werden je nach den spezifischen Anforderungen und Herausforderungen des jeweiligen Prozesses ausgewählt und angepasst. Die Kombination mehrerer Technologien kann ebenfalls zur Erreichung optimaler Ergebnisse führen.
Weiterführende Links





Unsere Kunden